|
|
| (36 dazwischenliegende Versionen von 3 Benutzern werden nicht angezeigt) |
| Zeile 1: |
Zeile 1: |
| [[Kategorie:Informatik]] | | [[Kategorie:Informatik]] |
| [[Kategorie:Informatik-Abitur]] | | [[Kategorie:Informatik-Abitur]] |
| | [[Kategorie:Informatik-Q1]] |
| [[Kategorie:Datenstrukturen(IF)]] | | [[Kategorie:Datenstrukturen(IF)]] |
|
| |
|
| [[File:Graph_staedte_entfernungen.png|thumb|Graph für die Distanzen zwischen Städten |400px]] | | [[File:Graph_staedte_entfernungen.png|thumb|Graph für die Distanzen zwischen Städten |400px]] |
| | <font color='red'>'''nur relevant für den Leistungskurs!'''</font> |
| | |
| Ein Graph ist in der Graphentheorie eine Struktur, die eine Menge von Objekten zusammen mit den zwischen diesen Objekten bestehenden Verbindungen repräsentiert. | | Ein Graph ist in der Graphentheorie eine Struktur, die eine Menge von Objekten zusammen mit den zwischen diesen Objekten bestehenden Verbindungen repräsentiert. |
|
| |
| Die mathematischen Abstraktionen der Objekte werden dabei '''Knoten''' des Graphen genannt. Die paarweisen Verbindungen zwischen Knoten heißen '''Kanten'''. | | Die mathematischen Abstraktionen der Objekte werden dabei '''Knoten''' des Graphen genannt. Die paarweisen Verbindungen zwischen Knoten heißen '''Kanten'''. |
|
| |
|
| Ein Graph kann entweder als Graph, als '''Adjazenzliste''' oder als '''Adjazenzmatrix''' dargestellt werden. | | Ein Graph kann entweder als Graph, als '''Adjazenzliste''' oder als '''Adjazenzmatrix''' dargestellt werden. |
|
| |
|
| ==Schnittstellenbeschreibung== | | =Erklärvideos= |
| * [[Datei:Graph.pdf]] | | |
| * [[Datei:GraphNode.pdf]]
| | * [https://youtu.be/bZLxTuG8cY0 Breiten- und Tiefendurchlauf: Theorie] |
| TODO: Erklärungen zur Schnittstelle
| | |
| | * [https://youtu.be/2mHKVXy0xqo Breitendurchlauf: Implementierung] |
| | |
| | * [https://youtu.be/cdNonZrj_WE Tiefendurchlauf: Implementierung] |
| | |
| | =Fachbegriffe= |
| | |
| | Graph, Knoten, markieren, Kante, Gewicht, Traversierung, Breitendurchlauf, Tiefendurchlauf |
| | |
| | =Schnittstellenbeschreibung= |
| | |
| | [[Medium:Graph_Schnittstellen_Abitur_2018.pdf|Graph Schnittstellenbeschreibung (ab Abi 2018)]] |
|
| |
|
| ==Adjazenzmatrix== | | ==Adjazenzmatrix== |
| Zeile 41: |
Zeile 54: |
| ||<b>Koeln</b> || || || 93 || 189 || || || || | | ||<b>Koeln</b> || || || 93 || 189 || || || || |
| |} | | |} |
| | |
| | TODO: Algorithmus zum Erzeugen eines Graphen aus einem 2D-Array (Adjazenzmatrix) |
| | |
| | ==Adjazenzliste== |
| | Man kann die Informationen eines Graphen auch als Adjazenzliste darstellen. Das bietet sich z.B. an, wenn es in einem Graphen nur wenige Kanten gibt; dann ist die komplette Adjazenzmatrix Platzverschwendung. |
| | |
| | In der Adjazenzliste werden '''<u>links</u> von oben nach unten''' alle Knoten aufgeführt, z.B. in alphabetischer Reihenfolge; die Reihenfolge ist aber frei wählbar. |
| | |
| | <u>'''Nach rechts'''</u> werden alle Nachbarknoten des linken Knoten mit den zugehörigen Entfernungen eingetragen. Auch hier ist die Reihenfolge frei wählbar. |
| | |
| | Der oben dargestelle Graph hat folgende Adjazenzliste: |
| | |
| | <code> |
| | '''Berlin''' → Hamburg (289) → Hannover (290) |
| | ↓ |
| | '''Bremen''' → Dortmund (234) → Hamburg (119) → Hannover (122) |
| | ↓ |
| | '''Dortmund''' → Bremen (234) → Hannover (210) → Kassel (190) → Köln (93) |
| | ↓ |
| | '''Frankfurt''' → Kassel (193) → Köln (189) |
| | ↓ |
| | '''Hamburg''' → Berlin (289) → Bremen (119) → Hannover (150) |
| | ↓ |
| | '''Hannover''' → Berlin (290) → Bremen (122) → Dortmund (210) → Hamburg (150) → Kassel (167) |
| | ↓ |
| | '''Kassel''' → Dortmund (160) → Frankfurt (193) → Hannover (167) |
| | ↓ |
| | '''Koeln''' → Dortmund (93) → Frankfurt (189) |
| | </code> |
|
| |
|
| ==Traversierungen von Graphen== | | ==Traversierungen von Graphen== |
| Zeile 74: |
Zeile 116: |
| Der Tiefendurchlauf durch einen Graphen wird am einfachsten '''rekursiv''' programmiert. | | Der Tiefendurchlauf durch einen Graphen wird am einfachsten '''rekursiv''' programmiert. |
|
| |
|
| <code> | | Voraussetzung: kein Knoten ist markiert! |
| public List tiefendurchlauf(Graph pGraph, GraphNode pNode){ | | |
| List knoten = new List(); | | <code> |
| pNode.mark(); | | public List<Vertex> tiefendurchlauf(Graph pGraph, Vertex pNode){ |
| //Alle Nachbarn des Startknoten holen | | List<Vertex> ergebnis = new List<>(); |
| List nachbarnListe = pGraph.getNeighbours(pNode); | | |
| //Nachbarn mit while-Schleife durchlaufen | | '''//Abbruchbedingung''' |
| nachbarnListe.toFirst(); | | if(pNode.isMarked()){ |
| while(nachbarnListe.hasAccess()){
| | return ergebnis; |
| GraphNode aktuellerNachbar = (GraphNode)h.getObject();
| | } |
| //Wenn der aktuelle Nachbar nicht markiert ist, also noch nicht besucht wurde,
| | |
| //zur Liste hinzufuegen und auch seine Nachbarn durch den rekursiven Aufruf besuchen.
| | // pNode an die ergebnis-Liste anhaengen und markieren |
| if( !aktuellerNachbar.isMarked() ){
| | ergebnis.append(pNode); |
| knoten.append(aktuellerNachbar);
| | pNode.setMark(true); |
| aktuellerNachbar.mark();
| | |
| //Rekursiver Aufruf
| | //Alle Nachbarn von pNode |
| List weitereKnotenListe = <b>erreichbareNodes</b>(pGraph, aktuellerNachbar);
| | List<Vertex> nachbarn = pGraph.getNeighbours(pNode); |
| knoten.concat(weitereKnotenListe);
| | |
| }
| | //Nachbarn mit for-Schleife durchlaufen |
| nachbarnListe.next();
| | '''for(nachbarn.toFirst(); nachbarn.hasAccess(); nachbarn.next()){''' |
| | Vertex aktuellerNachbar = nachbarn.getContent(); |
| | '''//Rekursiver Aufruf''' |
| | List<Vertex> erg2 = <b><u>tiefendurchlauf(pGraph, aktuellerNachbar)</u></b>; |
| | ergebnis.concat(erg2); |
| } | | } |
| return knoten; | | return ergebnis; |
| } | | } |
| </code> | | </code> |
|
| |
|
| === Breitendurchlauf=== | | === Breitendurchlauf=== |
| Zeile 144: |
Zeile 190: |
| # Dann wird <code>knotenListe</code> von Anfang bis Ende durchlaufen. Dabei passiert folgendes: | | # Dann wird <code>knotenListe</code> von Anfang bis Ende durchlaufen. Dabei passiert folgendes: |
| ## Für jeden Nachbarknoten des aktuellen Knoten wird überprüft, ob er schon ''besucht'' wurde. Wenn nein, dann wird er als ''besucht'' markiert und in <code>knotenListe</code> eingefügt. | | ## Für jeden Nachbarknoten des aktuellen Knoten wird überprüft, ob er schon ''besucht'' wurde. Wenn nein, dann wird er als ''besucht'' markiert und in <code>knotenListe</code> eingefügt. |
| So wächst die <code>knotenListe</code> von einem Element (=dem Startknoten) beginnend immer weiter an, während sie durchlaufen wird. Die Schleife kommt zum Ende, wenn alle Knoten eingefügt und als ''besucht'' gekennzeichnet sind. | | So wächst die <code>knotenListe</code> von einem Element (=dem Startknoten) beginnend immer weiter an, während sie durchlaufen wird. Die [[Schleife (Informatik)|Schleife]] kommt zum Ende, wenn alle Knoten eingefügt und als ''besucht'' gekennzeichnet sind. |
|
| |
|
| <code> | | <code> |
| public List breitenDurchlauf(Graph pGraph, GraphNode startKnoten){
| | public List<Vertex> breitenDurchlauf(Graph pGraph, Vertex pStart){ |
| List knotenListe = new List();
| | List<Vertex> ergebnis = new List<Vertex>(); |
| startKnoten.mark();
| | // alle Markierungen loeschen |
| knotenListe.append(startKnoten);
| | pGraph.setAllVertexMarks(false); |
| knotenListe.toFirst();
| | pGraph.setAllEdgeMarks(false); |
| while(knotenListe.hasAccess()){
| | // den Startknoten markieren und in ergebnis einfuegen |
| GraphNode aktuell = (GraphNode) knotenListe.getObject();
| | '''pStart.setMark(true);''' |
| List nachbarn = pGraph.getNeighbours(aktuell);
| | '''ergebnis.append(pStart);''' |
| nachbarn.toFirst();
| | // ergebnis durchlaufen: |
| while(nachbarn.hasAccess()){
| | // ergebnis hat zu Anfang nur ein Element... |
| GraphNode aktuellerNachbar = (GraphNode)nachbarn.getObject();
| | // ... waechst dann aber immer weiter! |
| if(!aktuellerNachbar.isMarked()){
| | '''for(ergebnis.toFirst(); ergebnis.hasAccess(); ergebnis.next()){''' |
| aktuellerNachbar.mark();
| | Vertex aktuell = ergebnis.getContent(); |
| knotenListe.append(aktuellerNachbar);
| | List<Vertex> nachbarn = pGraph.getNeighbours(aktuell); |
| }
| | // die Nachbarn mit einer Schleife durchlaufen |
| nachbarn.next();
| | '''for(nachbarn.toFirst(); nachbarn.hasAccess(); nachbarn.next()){''' |
| }
| | Vertex aktuellerNachbar = nachbarn.getContent(); |
| knotenListe.next();
| | // Wenn der aktuelleNachbar nicht markiert ist, |
| }
| | // wird er zu ergebnis hinzugefuegt |
| return knotenListe;
| | '''if(!aktuellerNachbar.isMarked()){''' |
| }
| | Edge kante = pGraph.getEdge(aktuell, aktuellerNachbar); |
| </code> | | kante.setMark(true); |
| | aktuellerNachbar.setMark(true); |
| | '''ergebnis.append(aktuellerNachbar);''' |
| | } |
| | } // ende des Durchlaufs durch die Nachbarn. |
| | } // ende des Durchlaufs durch ergebnis |
| | return ergebnis; |
| | } |
| | </code> |
|
| |
|
| == Kürzeste Wege in Graphen: Der Dijkstra-Algorithmus == | | == Backtracking: kürzeste Wege auf Graphen == |
| Mit Hilfe des Dijkstra-Algorithmus kann man für einen Startknoten die kürzesten Wege zu allen anderen Knoten des Graphen bestimmen.
| | siehe [[Backtracking]] |
|
| |
|
| === Idee des Dijkstra-Algorithmus=== | | == Dijkstra-Algorithmus: kürzeste Wege auf Graphen == |
| '''Notwendige Datenstrukturen'''
| | siehe [[Dijkstra-Algorithmus]] |
| * Für jeden Knoten wird der Vorgänger und ein Wert <code>distanz</code> gespeichert; <code>distanz</code> gibt die bisher beste gefundene Distanz zum Startknoten an.
| |
| * '''gelbe Liste''': In dieser Liste werden Knoten gespeichert, für die schon ein Distanzwert vorliegt, deren Distanz zum Startknoten aber noch nicht abschließend festgelegt werden konnte. Die Knoten erscheinen in der gelben Liste gemäß ihrem Distanzwert, und zwar in aufsteigender Reihenfolge.
| |
| * '''rote Liste''': Man braucht eine Liste, in der alle Knoten gespeichert werden, deren Distanz zum Startknoten abschließend festgestellt wurde.
| |
|
| |
|
| | == Anwendungsbeispiele zu Graphen == |
|
| |
|
| '''Algorithmus'''
| |
| # Die Distanz des Startknoten wird auf 0 gesetzt; der von allen anderen Knoten auf unendlich.
| |
| # Der Startknoten wird in die rote Liste eingefügt.
| |
| # Alle Nachbarknoten des Startknotens werden in die gelbe Liste eingefügt, und zwar gemäß ihrer Distanz zum Startknoten.
| |
| # Die folgenden Schritte laufen jetzt so lange, bis die gelbe Liste leer ist:
| |
| ## den ersten Knoten aus der gelben Liste (im folgenden <code>ersterGelber</code>) entnehmen und in die rote Liste einfügen. Denn die Distanz dieses Knotens ist endgültig geklärt.
| |
| ## für alle Nachbarknoten von <code>ersterGelber</code> überprüft man:
| |
| ### wenn sie noch nicht in der gelben Liste sind: Distanz berechnen (=Distanz von <code>ersterGelber</code> plus Kantenlänge von <code>ersterGelber</code>) und dann in die gelbe Liste hinzufügen (=gemäß der Distanz einfügen)
| |
| ### wenn sie schon in der gelben Liste sind: Überprüfen, ob die Distanz von <code>ersterGelber</code> plus Kantenlänge '''kleiner''' ist als die bisher gespeicherte Distanz: Dann hat man eine bessere Route gefunden! Die Distanz des Nachbarknoten wird dann entsprechend verbessert, wodurch sich seine Position in der gelben Liste verbessert.
| |
|
| |
|
| |
| '''Kürzester Weg für einen beliebigen Knoten'''
| |
| Die Distanz kann man direkt aus dem Knoten auslesen.
| |
|
| |
| Den kürzesten Weg von einem beliebigen Knoten zum Startknoten kann man jetzt angeben, indem man sich von dem Knoten aus immer zum nächsten Vorgänger hangelt, bis mn schließlich beim Startknoten angekommen ist.
| |
|
| |
| === Implementierung ===
| |
| Diese Implementierung umfasst zwei Klassen:
| |
| * <code>DijkstraAlgorithmus</code>
| |
| * <code>DijkstraNode</code>
| |
| Die Klasse <code>DijkstraAlgorithmus</code> enthält eine (lange...) Methode <code>initMap</code>, damit man das Ganze auch testen kann.
| |
|
| |
|
| |
| <b>Klasse <code>DijkstraAlgorithmus</code>:</b>
| |
|
| |
| <code>
| |
| import listen.List;
| |
| import listen.ListWithViewer;
| |
|
| |
| public class DijkstraAlgorithmus {
| |
| GraphWithViewer map;
| |
| ListWithViewer gelbeListe;
| |
|
| |
|
| |
| public void initMap(){
| |
| map = new GraphWithViewer();
| |
| DijkstraGraphNode kiel = new DijkstraGraphNode("Kiel");
| |
| map.addNode(kiel);
| |
| DijkstraGraphNode luebeck = new DijkstraGraphNode("Luebeck");
| |
| map.addNode(luebeck);
| |
| DijkstraGraphNode hamburg = new DijkstraGraphNode("Hamburg");
| |
| map.addNode(hamburg);
| |
| DijkstraGraphNode berlin = new DijkstraGraphNode("Berlin");
| |
| map.addNode(berlin);
| |
| DijkstraGraphNode bremen = new DijkstraGraphNode("Bremen");
| |
| map.addNode(bremen);
| |
| DijkstraGraphNode hannover = new DijkstraGraphNode("Hannover");
| |
| map.addNode(hannover);
| |
| DijkstraGraphNode dortmund = new DijkstraGraphNode("Dortmund");
| |
| map.addNode(dortmund);
| |
| DijkstraGraphNode bochum = new DijkstraGraphNode("Bochum");
| |
| map.addNode(bochum);
| |
| DijkstraGraphNode koeln = new DijkstraGraphNode("Koeln");
| |
| map.addNode(koeln);
| |
| DijkstraGraphNode bonn = new DijkstraGraphNode("Bonn");
| |
| map.addNode(bonn);
| |
| DijkstraGraphNode mainz = new DijkstraGraphNode("Mainz");
| |
| map.addNode(mainz);
| |
| DijkstraGraphNode frankfurt = new DijkstraGraphNode("Frankfurt");
| |
| map.addNode(frankfurt);
| |
| DijkstraGraphNode kassel = new DijkstraGraphNode("Kassel");
| |
| map.addNode(kassel);
| |
| DijkstraGraphNode wuerzburg = new DijkstraGraphNode("Wuerzburg");
| |
| map.addNode(wuerzburg);
| |
| DijkstraGraphNode leipzig = new DijkstraGraphNode("Leipzig");
| |
| map.addNode(leipzig);
| |
| DijkstraGraphNode nuernberg = new DijkstraGraphNode("Nuernberg");
| |
| map.addNode(nuernberg);
| |
| DijkstraGraphNode stuttgart = new DijkstraGraphNode("Stuttgart");
| |
| map.addNode(stuttgart);
| |
| DijkstraGraphNode muenchen = new DijkstraGraphNode("Muenchen");
| |
| map.addNode(muenchen);
| |
| DijkstraGraphNode karlsruhe = new DijkstraGraphNode("Karlsruhe");
| |
| map.addNode(karlsruhe);
| |
|
| |
| map.addEdge(kiel, hamburg, 97);
| |
| map.addEdge(kiel, luebeck, 84);
| |
| map.addEdge(luebeck, hamburg, 74);
| |
| map.addEdge(luebeck, berlin, 284);
| |
| map.addEdge(berlin, hamburg, 289);
| |
| map.addEdge(hamburg, bremen, 119);
| |
| map.addEdge(bremen, hannover, 122);
| |
| map.addEdge(hannover, hamburg, 150);
| |
| map.addEdge(berlin, hannover, 290);
| |
| map.addEdge(berlin, leipzig, 188);
| |
| map.addEdge(hannover, kassel, 167);
| |
| map.addEdge(leipzig, kassel, 250);
| |
| map.addEdge(kassel, dortmund, 160);
| |
| map.addEdge(dortmund, bremen, 234);
| |
| map.addEdge(dortmund, hannover, 210);
| |
| map.addEdge(dortmund, bochum, 22);
| |
| map.addEdge(dortmund, koeln, 93);
| |
| map.addEdge(koeln, bochum, 82);
| |
| map.addEdge(koeln, bonn, 29);
| |
| map.addEdge(bonn, mainz, 169);
| |
| map.addEdge(frankfurt, mainz, 45);
| |
| map.addEdge(frankfurt, kassel, 193);
| |
| map.addEdge(leipzig, nuernberg, 278);
| |
| map.addEdge(kassel, wuerzburg, 209);
| |
| map.addEdge(wuerzburg, nuernberg, 110);
| |
| map.addEdge(wuerzburg, frankfurt, 119);
| |
| map.addEdge(nuernberg, muenchen, 166);
| |
| map.addEdge(muenchen, stuttgart, 223);
| |
| map.addEdge(nuernberg, stuttgart, 208);
| |
| map.addEdge(stuttgart, karlsruhe, 82);
| |
| map.addEdge(karlsruhe, frankfurt, 147);
| |
| map.addEdge(frankfurt, koeln, 189);
| |
| map.switchToISOMLayout();
| |
| }
| |
|
| |
| <b>public void dijkstraAlgorithmus</b>(String startpunkt) {
| |
| gelbeListe = new ListWithViewer();
| |
| DijkstraGraphNode startNode = (DijkstraGraphNode) map.getNode(startpunkt);
| |
| startNode.setDistanz(0);
| |
| gelbeListe.append(startNode);
| |
| while(gelbeListe.isEmpty() == false){
| |
| gelbeListe.toFirst();
| |
| DijkstraGraphNode node = (DijkstraGraphNode) gelbeListe.getObject();
| |
| //System.out.println("node: "+node);
| |
| gelbeListe.remove();
| |
| node.mark();
| |
| node.ausgeben();
| |
| List neighbours = map.getNeighbours(node);
| |
| neighbours.toFirst();
| |
| while(neighbours.hasAccess()){
| |
| DijkstraGraphNode currentNeighbour = (DijkstraGraphNode) neighbours.getObject();
| |
| //System.out.println("currentNeighbour: "+currentNeighbour);
| |
| double streckeNodeCurrentNeighbour = map.getEdgeWeight(node, currentNeighbour);
| |
| if(currentNeighbour.getDistanz() > node.getDistanz()+streckeNodeCurrentNeighbour){
| |
| // ueber node fuehrt eine kuerzere Strecke zu currentNeighbour!
| |
| currentNeighbour.setVorgaenger(node);
| |
| currentNeighbour.setDistanz(node.getDistanz()+streckeNodeCurrentNeighbour);
| |
| // currentNeighbour in gelbeListe einfuegen bzw. ersetzen
| |
| inGelbeListeUpdaten(currentNeighbour);
| |
| }
| |
| neighbours.next();
| |
| }
| |
| }
| |
| }
| |
|
| |
| /**
| |
| * sorgt dafuer, dass node gemaess seiner Distanz
| |
| * die richtige Position in der gelbeListe bekommt.
| |
| * wenn node noch gar nicht in gelbeListe enthalten ist,
| |
| * dann wird node an der richtigen Stelle eingefuegt.
| |
| */
| |
| <b>private void inGelbeListeUpdaten</b>(DijkstraGraphNode node) {
| |
| boolean inserted = false;
| |
| gelbeListe.toFirst();
| |
| while(gelbeListe.hasAccess()){
| |
| DijkstraGraphNode aktuell = (DijkstraGraphNode) gelbeListe.getObject();
| |
| if(aktuell.getDistanz() >= node.getDistanz()){
| |
| gelbeListe.insert(node);
| |
| inserted = true;
| |
| break;
| |
| }
| |
| gelbeListe.next();
| |
| }
| |
| if(inserted){
| |
| // ggf. taucht currentNeighbour nochmal in der Liste auf!
| |
| // dann muss er entfernt werden!
| |
| while(gelbeListe.hasAccess()){
| |
| DijkstraGraphNode aktuell = (DijkstraGraphNode) gelbeListe.getObject();
| |
| if(aktuell.getName().equals(node.getName())){
| |
| gelbeListe.remove();
| |
| break;
| |
| }
| |
| gelbeListe.next();
| |
| }
| |
| }
| |
| else{
| |
| // der Knoten wurde noch nicht eingefuegt!
| |
| gelbeListe.append(node);
| |
| }
| |
|
| |
| }
| |
|
| |
| public static void main(String[] args) {
| |
| DijkstraAlgorithmus da = new DijkstraAlgorithmus();
| |
| da.initMap();
| |
| da.dijkstraAlgorithmus("Muenchen");
| |
| }
| |
| }
| |
| </code>
| |
|
| |
|
| |
|
| |
| <b>Klasse <code>DijktstraGraphNode</code>:</b>
| |
|
| |
| <code>
| |
| import listen.List;
| |
|
| |
| public class DijkstraGraphNode extends GraphNode implements Comparable {
| |
|
| |
| // es werden der Vorgaenger und die (bisher beste) Distanz zum Startknoten gespeichert.
| |
| private DijkstraGraphNode vorgaenger;
| |
| private double distanz;
| |
|
| |
| public DijkstraGraphNode(String name) {
| |
| super(name);
| |
| distanz = 1000000;
| |
| }
| |
|
| |
| public void setDistanz(double distanz){
| |
| this.distanz = distanz;
| |
| }
| |
|
| |
| public double getDistanz(){
| |
| return distanz;
| |
| }
| |
|
| |
| public void setVorgaenger(DijkstraGraphNode pNode){
| |
| this.vorgaenger = pNode;
| |
| }
| |
|
| |
| private DijkstraGraphNode getVorgaenger() {
| |
| return vorgaenger;
| |
| }
| |
|
| |
| public void ausgeben(){
| |
| DijkstraGraphNode aktuell = this;
| |
| while(aktuell != null){
| |
| System.out.print(aktuell+"<-");
| |
| aktuell = aktuell.getVorgaenger();
| |
| }
| |
| System.out.println();
| |
| }
| |
|
| |
| public String toString(){
| |
| String ergebnis = this.getName()+": "+this.distanz;
| |
| return ergebnis;
| |
| }
| |
|
| |
| /**
| |
| * vergleicht zwei DijkstraGraphNodes gemaess ihrer Distanz.
| |
| * diese Methode sorgt fuer die Implementierung der Schnittstelle Comparable;
| |
| * damit koennen dann z.B. Vectoren mit Inhalt DijkstraGraphNode einfach sortiert werden.
| |
| */
| |
| public int compareTo(Object arg0) {
| |
| DijkstraGraphNode dgn2 = (DijkstraGraphNode) arg0;
| |
| if(this.distanz < dgn2.distanz){
| |
| return -1;
| |
| }
| |
| if(this.distanz > dgn2.distanz){
| |
| return 1;
| |
| }
| |
| return 0;
| |
| }
| |
|
| |
| }
| |
|
| |
| </code>
| |
|
| |
| == Anwendungsbeispiele zu Graphen ==
| |
| ===Minimaler Spannbaum=== | | ===Minimaler Spannbaum=== |
| Ein Minimaler Spannbaum besteht aus einer Liste von Kanten des Graphen, die folgenden Bedingungen genügen muss:
| | siehe [[Minimaler Spannbaum]] |
| # die Kanten der Liste müssen alle Knoten des Graphen miteinander verbinden.
| |
| # die Gesamtlänge der Kanten in der Liste muss (im Hinblick auf die Erfüllung der 1. Bedingung) minimal sein.
| |
| | |
| ====Beispiel aus der Praxis====
| |
| Eine Stromfirma will ein Leitungsnetz aufbauen, das alle Städte verbindet. Keine Stadt darf ausgelassen werden. Das Stromnetz soll aber möglichst kurz sein.
| |
| | |
| ====Implementierung====
| |
| #Zu Anfang erzeugt man einen <code>ergebnisgraph</code>, der nur die Knoten des ursprünglichen Graphen enthält, aber nicht die Kanten.
| |
| #Alle Kanten des gesamten ursprünglichen Graphen werden ausgelesen werden ihrem Gewicht nach durchgegangen, wobei man beim kleinsten Gewicht anfängt.
| |
| ##Kann die momentan betrachtete Kante in den <code>ergebnisgraph</code> eingefuegt werden, ohne dass ein Kreis entsteht, wird sie eingefügt.
| |
| | |
| '''Hauptmethode'''
| |
| <code>
| |
| public Graph minimalerSpannbaum(Graph pGraph){
| |
| //es wird ein neuer Graph erstellt, der das Ergebnis hinterher anzeigt
| |
| Graph ergebnisGraph = new Graph();
| |
| //alle Knoten des uebergebenen Graphen werden in den spaeteren Ergebnisgraphen eingetragen
| |
| List nnodes = pGraph.getNodes();
| |
| nnodes.toFirst();
| |
| while(nnodes.hasAccess()){
| |
| GraphNode akt = (GraphNode)nnodes.getObject();
| |
| ergebnis.addNode(akt);
| |
| nnodes.next();
| |
| }
| |
| //alle Kanten werden ihrem Gewicht nach sortiert in einem Vector uebergeben
| |
| Vector<Edge> edges = alleKantenSortiert(pGraph);
| |
| //dieser Vector wird duchgegangen
| |
| for(int i = 0; i < edges.size(); i++){
| |
| //kann die aktuell im Vector betrachtete Kante eingefuegt werden, ohne dass ein Kreis entsteht,
| |
| //wird sie eingefuegt
| |
| Edge akt = edges.elementAt(i);
| |
| if(!erzeugtKreis(ergebnisGraph, edges.elementAt(i))){
| |
| ergebnisGraph.addEdge(akt.getNodeA(), akt.getNodeB(), akt.getWeight());
| |
| System.out.println("addEdge");
| |
| }
| |
| }
| |
| return ergebnisGraph;
| |
| }
| |
| </code>
| |
| | |
| '''Hilfsmethoden'''
| |
| | |
| Fuer die Ueberpruefung ob ein Kreis erzeugt wird ist eine eigene Methode hilfreich.
| |
| Hier wird von einem Knoten der einzufuegenden Kantre ausgehend ueberprueft, ob der andere Knoten erreichbar ist.
| |
| Wenn ja, dann wuerde durch einfuegen ein Kreis erzeugt, wenn nein nicht.
| |
| | |
| <code>
| |
| private boolean erzeugtKreis(Graph pGraph, Edge pEdge) {
| |
| //von dem einen Knoten aus erreichbare Nodes werden ausgelesen un in einer Liste gespeichert
| |
| List erreichbare = erreichbareNodes(pGraph, pEdge.getNodeA());
| |
| //und werden durchgegangen
| |
| erreichbare.toFirst();
| |
| while(erreichbare.hasAccess()){
| |
| //wird der Knoten, von dem ausgegangen wurde gefunden wuerde ein Kreis erzeugt und true ausgegeben
| |
| if(pEdge.getNodeB() == (GraphNode)erreichbare.getObject()){
| |
| return true;
| |
| }
| |
| erreichbare.next();
| |
| }
| |
| //wird der KNoten nicht gefunden wird false zurueckgegeben, da kein Kreis erzeugt wuerde
| |
| return false;
| |
| }
| |
| </code>
| |
| | |
| '''Anmerkung:''' Es gibt natürlich noch weitere Möglichkeiten die Strategie zu realisieren. Eine sehr einfache kommt ohne die Methode ''erreichbareNodes(...)'' aus: Man markiert alle bereits verbundenen Knoten (im Bsp. eines Stromnetzes: alle bereits "angeschlossenen" Knoten), also beim Einfügen jeder Kante die zu ihr gehörenden Knoten, falls diese noch nicht markiert sind. Diese Taktik macht das Überprüfen, ob beim Einfügen ein Kreis entsteht, sehr einfach: Falls beide zur Kante gehörenden Knoten bereits markiert sind, entstünde ein Kreis und die Kante darf nicht eingefügt werden.
| |
| | |
| ===Erreichbare Knoten ===
| |
| Um alle erreichbaren Knoten zu bekommen erstellen wir erst eine Liste ergebnis,
| |
| die am Ende ausgegen wird.Danach wird der Liste ergebnis der startNode angehangen.
| |
| Dieses Node wird dann im Graphen makiert. Danach wird eine while-Schleife geöffnet,
| |
| die solange läuft wie die Liste ergebnis ein aktuelles Objekt besitzt.
| |
| Sie fügt die Nachbarn des aktuellen Nodes in eine Liste nachbarliste1 ein. Eine weitere
| |
| while-Schleife wird geöffnet, die solange läuft, wie die Liste nachbarliste1 ein
| |
| aktuelles Objekt hat. Wenn das aktuelle Node nicht markiert ist wird das Objekt
| |
| dem ergebnis angefügt (also der erreichbare Nachbar wird in das Ergebnis geschrieben)
| |
| und das Node wird makiert. So werden am Ende mit der Liste ergebnis
| |
| alle erreichbare Nachbarn ausgegeben.
| |
|
| |
| <code>
| |
| public List erreichbareNodes(Graph pGraph,GraphNode pNode){
| |
| pGraph.resetMarks();
| |
| List ergebnis = new List();
| |
| ergebnis.append(pNode);
| |
| pNode.mark();
| |
| ergebnis.toFirst();
| |
| while(ergebnis.hasAccess()){
| |
| GraphNode akt1=(GraphNode) ergebnis.getObject();
| |
| List nachbarliste1 =pGraph.getNeighbours(akt1);
| |
| nachbarliste1.toFirst();
| |
| while(nachbarliste1.hasAccess()){
| |
| GraphNode akt2=(GraphNode) nachbarliste1.getObject();
| |
| if(akt2.isMarked()==false){
| |
| ergebnis.append(akt2);
| |
| akt2.mark();
| |
| }
| |
| nachbarliste1.next();
| |
| }
| |
| ergebnis.next();
| |
| }
| |
| return ergebnis;
| |
| }
| |
| </code>
| |
| | |
| ===Beispiel: Knoten mit ungerader Kantenzahl markieren ===
| |
| TODO: Methode erklären
| |
| <code>
| |
| TODO: Quelltext gut kommentiert einfügen
| |
| </code>
| |
| | |
| ===Beispiel: Summe der Kantenkosten eines Knotens bestimmen===
| |
| <code>
| |
| public int Kantenkosten(GraphWithViewer pGraph, GraphNode pNode)
| |
| {
| |
| int ergebnis = 0; // Variable zum Speichern der Kosten wird deklariert
| |
| List nachbarn = pGraph.getNeighbours(pNode);
| |
| nachbarn.toFirst();
| |
| while(nachbarn.hasAccess()) // Schleife durchläuft einmal alle Nachbarn
| |
| {
| |
| GraphNode akt = (GraphNode)nachbarn.getObject();
| |
| int help = (int) pGraph.getEdgeWeight(pNode, akt);
| |
| ergebnis=ergebnis+help; //Distanz wird hinzugefügt
| |
| nachbarn.next();
| |
| }
| |
| return ergebnis; // Distanz wird ausgegeben
| |
| }
| |
| </code>
| |
| | |
| ===Beispiel: Knoten mit maximalen Kantenkosten bestimmen ===
| |
| TODO: Methode erklären
| |
| <code>
| |
| TODO: Quelltext gut kommentiert einfügen
| |
| </code>
| |
| | |
| ===Beispiel: Nächsten Nachbarn eines Knotens bestimmen ===
| |
| | |
| ====Strategie: ====
| |
| Man entfernt alle markierten Nodes aus der NachbarListe und durchläuft diese Liste und guckt, welches die kürzeste Kante zu pNode hat.
| |
| | |
| <code>
| |
| | |
| public GraphNode gibNaechstenNachbarn(GraphWithViewer gwv, GraphNode pNode)
| |
| {
| |
| GraphNode ergebnis = null;
| |
| double gewicht;
| |
| List nachbarListe = gwv.getNeighbours(pNode);
| |
| // alle Nachbarn werden in die NachbarListe eingefügt
| |
| nachbarListe.toFirst();
| |
| while(nachbarListe.hasAccess())
| |
| {
| |
| GraphNode aktKn=(GraphNode)nachbarListe.getObject();
| |
| if(aktKn.isMarked())
| |
| // wenn ein Objekt der NachbarListe markiert ist, dann wird es entfernt.
| |
| {
| |
| nachbarListe.remove();
| |
| }
| |
| else{
| |
| nachbarListe.next();
| |
| }
| |
| }
| |
| nachbarListe.toFirst();
| |
| // das erste Objekt der nachbarListe wird als Ergebnis deklariert
| |
| // und das Gewicht der Kante von diesem Objekt zu pNode als Gewicht
| |
| ergebnis = (GraphNode)nachbarListe.getObject();
| |
| gewicht = gwv.getEdgeWeight(pNode, ergebnis);
| |
| nachbarListe.next();
| |
| while(nachbarListe.hasAccess())
| |
| {
| |
| GraphNode aktuellerNode = (GraphNode)nachbarListe.getObject();
| |
| double aktuellesGewicht = gwv.getEdgeWeight(pNode, aktuellerNode);
| |
| if(aktuellesGewicht<gewicht)
| |
| // wenn ein Gewicht einer Kante von einem Nachbarn zu pNode kleiner ist als das Gewicht,
| |
| // dann wird dieses das neue Gewicht und der Nachbar wird das Ergebnis
| |
| {
| |
| ergebnis = aktuellerNode;
| |
| gewicht = gwv.getEdgeWeight(pNode, aktuellerNode);
| |
| }
| |
| nachbarListe.next();
| |
| }
| |
| return ergebnis;
| |
| }
| |
|
| |
| </code>
| |
| | |
| ===Beispiel: Überprüfen, ob im Graphen ein Dreierkreis existiert ===
| |
| TODO: Methode erklären
| |
| <code>
| |
| TODO: Quelltext gut kommentiert einfügen
| |
| </code>
| |
| | |
| ===Beispiel: Alle Nachbarn zählen===
| |
| TODO: Quellcode erklären und im Quellcode kommentieren
| |
| <code>
| |
| public int zaehleNachbarn(GraphWithViewer pGraph, GraphNode pNode){
| |
| int ergebnis = 0;
| |
| List neighbours = graph.getNeighbours(pNode);
| |
|
| |
| neighbours.toFirst();
| |
| while(neighbours.hasAccess()){
| |
| ergebnis++;
| |
| neighbours.next();
| |
| }
| |
| return ergebnis;
| |
| }
| |
| </code>
| |
| | |
| ===Beispiel: Wer hat die meisten Nachbarn===
| |
| TODO: Quellcode erklären und im Quellcode kommentieren
| |
| | |
| <code>
| |
| public String meisteNachbarn(GraphWithViewer Ggraph){
| |
| List hilfe=new List();
| |
| hilfe.concat(Ggraph.getNodes());
| |
| hilfe.toFirst();
| |
| GraphNode aktNode =null;
| |
| int max=-1;
| |
| while(hilfe.hasAccess())
| |
| {
| |
| GraphNode aktuell=(GraphNode)hilfe.getObject();
| |
| int akt=this.kantenzahl(Ggraph, aktuell);
| |
| if(akt>max)
| |
| {
| |
| max=akt;
| |
| aktNode=(GraphNode)hilfe.getObject();
| |
| }
| |
| else{
| |
| hilfe.next();
| |
| }
| |
| }
| |
| System.out.println(max);
| |
| return aktNode.getName();
| |
| }
| |
| </code>
| |
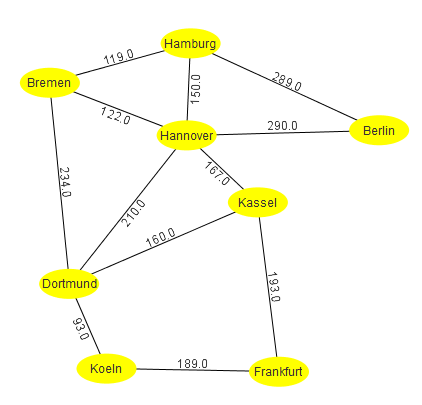
Graph für die Distanzen zwischen Städten
nur relevant für den Leistungskurs!
Ein Graph ist in der Graphentheorie eine Struktur, die eine Menge von Objekten zusammen mit den zwischen diesen Objekten bestehenden Verbindungen repräsentiert.
Die mathematischen Abstraktionen der Objekte werden dabei Knoten des Graphen genannt. Die paarweisen Verbindungen zwischen Knoten heißen Kanten.
Ein Graph kann entweder als Graph, als Adjazenzliste oder als Adjazenzmatrix dargestellt werden.
Erklärvideos
Fachbegriffe
Graph, Knoten, markieren, Kante, Gewicht, Traversierung, Breitendurchlauf, Tiefendurchlauf
Schnittstellenbeschreibung
Graph Schnittstellenbeschreibung (ab Abi 2018)
Adjazenzmatrix
Knoten und Kanten eines Graphen können in Form einer Matrix dargestellt werden.
Die Matrix ist dabei spiegelsymmetrisch.
Der oben dargestellte Graph hat folgende Adjazenzmatrix:
|
Berlin |
Bremen |
Dortmund |
Frankfurt |
Hamburg |
Hannover |
Kassel |
Koeln
|
| Berlin |
|
|
|
|
289 |
290 |
|
|
| Bremen |
|
|
234 |
|
119 |
122 |
|
|
| Dortmund |
|
234 |
|
|
|
210 |
160 |
93
|
| Frankfurt |
|
|
|
|
|
|
193 |
189
|
| Hamburg |
289 |
119 |
|
|
|
150 |
|
|
| Hannover |
290 |
122 |
210 |
|
150 |
|
167 |
|
| Kassel |
|
|
160 |
193 |
|
167 |
|
|
| Koeln |
|
|
93 |
189 |
|
|
|
|
TODO: Algorithmus zum Erzeugen eines Graphen aus einem 2D-Array (Adjazenzmatrix)
Adjazenzliste
Man kann die Informationen eines Graphen auch als Adjazenzliste darstellen. Das bietet sich z.B. an, wenn es in einem Graphen nur wenige Kanten gibt; dann ist die komplette Adjazenzmatrix Platzverschwendung.
In der Adjazenzliste werden links von oben nach unten alle Knoten aufgeführt, z.B. in alphabetischer Reihenfolge; die Reihenfolge ist aber frei wählbar.
Nach rechts werden alle Nachbarknoten des linken Knoten mit den zugehörigen Entfernungen eingetragen. Auch hier ist die Reihenfolge frei wählbar.
Der oben dargestelle Graph hat folgende Adjazenzliste:
Berlin → Hamburg (289) → Hannover (290)
↓
Bremen → Dortmund (234) → Hamburg (119) → Hannover (122)
↓
Dortmund → Bremen (234) → Hannover (210) → Kassel (190) → Köln (93)
↓
Frankfurt → Kassel (193) → Köln (189)
↓
Hamburg → Berlin (289) → Bremen (119) → Hannover (150)
↓
Hannover → Berlin (290) → Bremen (122) → Dortmund (210) → Hamburg (150) → Kassel (167)
↓
Kassel → Dortmund (160) → Frankfurt (193) → Hannover (167)
↓
Koeln → Dortmund (93) → Frankfurt (189)
Traversierungen von Graphen
Wie bei Bäumen gibt es auch bei Graphen viele Anwendungen, in denen ein Graph knotenweise durchlaufen werden muss.
Die Traversierungsverfahren ähneln denen bei Bäumen, berücksichtigen allerdings noch die speziellen Gegebenheiten von Graphen, nämlich:
- Graphenknoten können mehr als zwei Nachbarn haben
- Graphen können Querverbindungen und "Kreise" enthalten
Tiefendurchlauf
Erläuterung
Beim Tiefendurchlauf (engl. Depth First Search - DFS) durch einen Baum nimmt man ausgehend von einem Startknoten den ersten Nachbarknoten. Von diesem nimmt man wieder den ersten Nachbarknoten usw. Wenn man dann in eine Sackgasse gerät, geht man eine Stufe zurück und nimmt den nächsten Nachbarknoten.
Natürlich werden Knoten, die man schon besucht hat, nicht noch einmal berücksichtigt.
Der Tiefendurchlauf entspricht der Preorder-Traversierung eines Baumes.
Beispiel:
Es gibt für jeden Startknoten mehrere mögliche Tiefendurchläufe, denn man kann sich bei den Nachbarknoten frei entscheiden, welchen man zuerst nimmt. In diesem Beispiel werden die Nachbarknoten immer nach alphabetischer Ordnung genommen.
Tiefendurchlauf für den Startknoten Frankfurt:
Zu Anfang kann man immer direkt weitergehen:
Frankfurt -> Kassel -> Dortmund -> Bremen -> Hamburg -> Berlin -> Hannover
Von Hannover aus ist kein freier Knoten mehr erreichbar. Deswegen muss man jetzt in der Liste zurckgehen, bis man zu einem Knoten kommt, der noch einen freien Nachbarknoten hat. Das ist in diesem Fall Dortmund (der freie Nachbarknoten ist Koeln). Das heißt, Koeln wird als nächstes angehängt, und man würde von Köln aus weitersuchen (wenn es noch freie Knoten gäbe...)
Ergebnis:
Frankfurt -> Kassel -> Dortmund -> Bremen -> Hamburg -> Berlin -> Hannover -> Koeln
Implementierung
Der Tiefendurchlauf durch einen Graphen wird am einfachsten rekursiv programmiert.
Voraussetzung: kein Knoten ist markiert!
public List<Vertex> tiefendurchlauf(Graph pGraph, Vertex pNode){
List<Vertex> ergebnis = new List<>();
//Abbruchbedingung
if(pNode.isMarked()){
return ergebnis;
}
// pNode an die ergebnis-Liste anhaengen und markieren
ergebnis.append(pNode);
pNode.setMark(true);
//Alle Nachbarn von pNode
List<Vertex> nachbarn = pGraph.getNeighbours(pNode);
//Nachbarn mit for-Schleife durchlaufen
for(nachbarn.toFirst(); nachbarn.hasAccess(); nachbarn.next()){
Vertex aktuellerNachbar = nachbarn.getContent();
//Rekursiver Aufruf
List<Vertex> erg2 = tiefendurchlauf(pGraph, aktuellerNachbar);
ergebnis.concat(erg2);
}
return ergebnis;
}
Breitendurchlauf
Der Breitendurchlauf (engl. breadth first search - BFS) ist eine Methode, um alle Knoten eines Graphen aufzuzählen.
Erläuterung
Mit dem Breitendurchlauf werden die Knoten in folgender Reihenfolge aufgezählt:
- zuerst der Startknoten,
- dann die Nachbarknoten des Startknotens, d.h. alle Knoten, die vom Startknoten aus über eine Kante erreichbar sind.
- dann die Knoten, die vom Startknoten aus mit zwei Kanten erreichbar sind.
- usw.
Knoten, die schon einmal aufgezählt wurden, werden natürlich nicht wieder aufgezählt.
Im Binärbaum ist der Breitendurchlauf genau Levelorder.
Beispiel
Beim Breitendurchlauf gibt es für jeden Startknoten mehrere Möglichkeiten, denn mann kann zwischen den Nachbarknoten wählen. Hier werden die Nachbarknoten immer in alphabetischer Reihenfolge betrachtet.
Breitendurchlauf für den Startknoten Frankfurt
Erst der Startknoten und seine Nachbarknoten:
Frankfurt -> Kassel -> Koeln
Jetzt wird von den Nachbarknoten der erste genommen und dessen Nachbarknoten werden betrachtet:
Frankfurt -> Kassel -> Koeln -> Dortmund -> Hannover
Der nächste Knoten in der Liste, der noch freie Nachbarknoten hat, ist Dortmund:
Frankfurt -> Kassel -> Koeln -> Dortmund -> Hannover -> Bremen
Schließlich die Nachbarknoten von Hannover:
Frankfurt -> Kassel -> Koeln -> Dortmund -> Hannover -> Bremen -> Berlin -> Hamburg
Beim Breitendurchlauf wird also zuerst die "nähere Umgebung" betrachtet.
Implementierung
Die Implementierung setzt darauf auf, dass der Graph linearisiert wird:
Man braucht eine knotenListe; in diese werden nach und nach alle Knoten des Graphen gemäß der Breitendurchlauf-Reihenfolge eingefügt.
- zuerst wird der Startknoten als besucht markiert und in
knotenListe eingefügt.
- Dann wird
knotenListe von Anfang bis Ende durchlaufen. Dabei passiert folgendes:
- Für jeden Nachbarknoten des aktuellen Knoten wird überprüft, ob er schon besucht wurde. Wenn nein, dann wird er als besucht markiert und in
knotenListe eingefügt.
So wächst die knotenListe von einem Element (=dem Startknoten) beginnend immer weiter an, während sie durchlaufen wird. Die Schleife kommt zum Ende, wenn alle Knoten eingefügt und als besucht gekennzeichnet sind.
public List<Vertex> breitenDurchlauf(Graph pGraph, Vertex pStart){
List<Vertex> ergebnis = new List<Vertex>();
// alle Markierungen loeschen
pGraph.setAllVertexMarks(false);
pGraph.setAllEdgeMarks(false);
// den Startknoten markieren und in ergebnis einfuegen
pStart.setMark(true);
ergebnis.append(pStart);
// ergebnis durchlaufen:
// ergebnis hat zu Anfang nur ein Element...
// ... waechst dann aber immer weiter!
for(ergebnis.toFirst(); ergebnis.hasAccess(); ergebnis.next()){
Vertex aktuell = ergebnis.getContent();
List<Vertex> nachbarn = pGraph.getNeighbours(aktuell);
// die Nachbarn mit einer Schleife durchlaufen
for(nachbarn.toFirst(); nachbarn.hasAccess(); nachbarn.next()){
Vertex aktuellerNachbar = nachbarn.getContent();
// Wenn der aktuelleNachbar nicht markiert ist,
// wird er zu ergebnis hinzugefuegt
if(!aktuellerNachbar.isMarked()){
Edge kante = pGraph.getEdge(aktuell, aktuellerNachbar);
kante.setMark(true);
aktuellerNachbar.setMark(true);
ergebnis.append(aktuellerNachbar);
}
} // ende des Durchlaufs durch die Nachbarn.
} // ende des Durchlaufs durch ergebnis
return ergebnis;
}
Backtracking: kürzeste Wege auf Graphen
siehe Backtracking
Dijkstra-Algorithmus: kürzeste Wege auf Graphen
siehe Dijkstra-Algorithmus
Anwendungsbeispiele zu Graphen
Minimaler Spannbaum
siehe Minimaler Spannbaum
